Hogyan lehet egy számlálót egy tekercselőgéphez igazítani. Elektronikus menetszámláló csévélőgéphez
Miután áttekintettem a magazinban megjelent számos különféle célra szolgáló számlálót (például ), úgy döntöttem, hogy kifejlesztek egy saját verziót egy fordulatszámlálóról, amely egy mikrokontroller nem felejtő memóriáját használja. Ennek eredményeként egyszerű és könnyen kezelhető tekercselési számlálót lehetett létrehozni egy csévélőgéphez, amely nem tartalmaz szűkös alkatrészeket.
Rizs. 1
A számláló több csomópontból áll ( rizs. 1). A kialakítás alapja a DD1 mikrokontroller, amelyhez R10-R16 áramkorlátozó ellenállásokon keresztül egy négyjegyű HG1 LED jelző csatlakozik. Két optocsatoló - egy IR-kibocsátó dióda-fototranzisztor (VD2VT1, VD3VT2) -, amelyek a gép munkatengelyéhez fordulatszám-érzékelőt képeznek, alacsony szintű impulzusokat generálnak, amelyekből a mikrokontroller meghatározza a forgásirányt és a tengely fordulatszámát. Van egy SB1 gomb a memória visszaállításához, valamint a segédáramkörök: R2C2, amely a mikrokontroller beépített óragenerátorának részeként működik, VD1C1, amely fenntartja a mikrokontroller SLEEP módba kapcsolásához szükséges tápfeszültséget, és R6R8, amely a mérő tápfeszültségét figyeli.
Ismeretes, hogy a PIC család mikrovezérlői meglehetősen szeszélyesek az EEPROM-mal való munka során (különösen, ha az írás automatikusan történik). A tápfeszültség csökkentése torzíthatja a memória tartalmát A számláló működése közben a mikrokontroller RB1 (7-es érintkező) vonala, amelyre az R6R8 áramkör csatlakozik, lekérdezi a tápfeszültség meglétét, és ha eltűnik, akkor a VD1C1 áramkörnek köszönhetően a mikrokontroller alvó módba tud lépni, ezáltal blokkolja a további programvégrehajtást és védi az EEPROM-ban lévő információkat. A számlálási folyamat során a mikrokontroller a gép munkatengelyének minden egyes fordulata után számokat tárol a memóriában. Minden alkalommal, amikor a készüléket bekapcsolja, a HG1 jelző a leállítás előtti számot mutatja.
Az érzékelő egy kis nyomtatott áramköri lap (22x22 mm), amelyre két kibocsátó dióda és két fototranzisztor van felszerelve, úgy szerelve, hogy két optikai adó-vevő csatornát képezzenek. A csatornák optikai tengelyei párhuzamosak, az interaxiális távolság kb. 10 mm.
A gép munkatengelyére 1...2 mm vastag, infravörös sugarakat át nem eresztő kemény anyagból (textolit, getinax, fém, műanyag) készült korong alakú redőny van rögzítve. A függöny átmérője 35…50 mm, a központi rögzítőfurat átmérője megegyezik a tengely átmérőjével. A tábla úgy van rögzítve a gépen, hogy a tengellyel együtt forgó függöny mindkét IR sugarat blokkolni tudja.
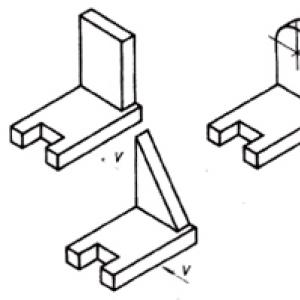
A függönybe egy hiányos szektor alakú kivágást vágnak. A kivágás szögszélességének és mélységének olyannak kell lennie, hogy a tengely forgásakor a redőny lehetővé tegye az infravörös sugárzás rövid távú átjutását, először csak az egyik csatornán, majd mindkettőn, végül csak a másik csatornán keresztül, amint az sematikusan látható az ábrán. rizs. 2. Az egyik vagy másik pozícióban nyitott csatornák színnel jelennek meg. Az érzékelőtől érkező jelek ilyen sorrendje lehetővé teszi a mikrokontroller számára, hogy meghatározza a gép munkatengelyének forgásirányát.

A mérőt három AA galvanikus cellából álló akkumulátor (R6) táplálja, de bármilyen 5 V stabilizált kimeneti feszültségű hálózati egységet használhat.
A „felületi” ellenállások helyett MLT-0,125 vagy S2-23 használható 0,062 W teljesítménnyel. SB1 gomb - bármely gomb, amely megfelel a táblán lévő rögzítési helynek. Az E40281-L-O-0-W helyett az FYQ-2841CLR digitális jelző alkalmas.
A mikrokontroller program fejlesztése és hibakeresése Proteus környezetben történt, majd az ICProg programozó segítségével betöltődött a mikrokontrollerbe. A mikrokontroller panelbe történő telepítése után a mérő első és további bekapcsolásakor a jelző mínuszjelet mutat minden ismert helyen. Körülbelül két másodperc múlva nullák jelennek meg a kijelzőn - ez annak a jele, hogy a mérő üzemkész.
A program vészhelyzeti memória-reset funkciót biztosít arra az esetre, ha hibás információt kapna és a mikrokontroller lefagyna (ez rendkívül ritkán, de előfordulhat). A mikrokontroller működési módba való visszaállításához ki kell kapcsolnia a mérőműszert, meg kell nyomnia a „Reset” gombot, és anélkül, hogy elengedné, kapcsolja be a tápfeszültséget. Amint a kijelzőn nullák jelennek meg, folytathatja a munkát, de az előző fordulatszámra vonatkozó információk természetesen elvesznek.
A megfelelően összeállított készülék nem igényel beállítást.
IRODALOM
1. Dolgiy A. Továbbfejlesztett megfordítható számláló. - Rádió, 2005, 11. szám, p. 28, 29.
2. Gasanov A., Gasanov R. Elektronikus mérő. - Rádió. 2006, 11. sz. 35, 36.
A. BANKOV, Orel (Rádió, 2011. 8. szám)
1. lehetőség: ATmega8 + Nokia 5110 LCD + 3V tápegység
Az áramkör Atmega8-8PU-t (külső kvarc 8 MHz-es frekvenciával), Nokia 5110 LCD-t és tranzisztort használ a reed-kapcsoló impulzusainak feldolgozásához. A 3,3 V-os feszültségszabályozó biztosítja az áramellátást a teljes áramkör számára.
Az összes alkatrészt a kenyérsütőtáblára szerelték, beleértve a csatlakozókat a következőkhöz: ISP programozó (USBAsp), 5110 Nokia LCD, táp (5 V a 3,3 V-os szabályozóhoz), reed kapcsoló, reset gomb és egy 2 tűs csatlakozó a tekercselés polaritásának olvasására motort, hogy tudja, növelje vagy csökkentse a számlálót.
A csatlakozók célja:
J1: Erő. 5 V feszültséget kap a csatlakozó, majd az L7833 stabilizátor, hogy megkapja az ATmega8 és az LCD által használt 3,3 V feszültséget.
J2: LCD csatlakozó Nokia 5110 LCD-hez.
J3: Reed kapcsoló. Impulzus bemenet a mikrokontrollerrel történő számláláshoz.
J4: Polaritás csatlakozó. A motor tekercselésével párhuzamosan kell csatlakoztatni. A nyomkövető áramkört 12 voltos motorhoz tervezték, de az R3-R4 és R5-R6 által alkotott feszültségosztók értékeinek beállításával más motorfeszültségekre is alkalmazható. Ha a motor egyenes polaritással van csatlakoztatva, a PD0 naplózása magas lesz. szinten, ha a motor fordított polaritásra van csatlakoztatva, akkor a PD1 magas log-értékkel rendelkezik. szint. Ez az információ a kódban a számláló növelésére vagy csökkentésére szolgál.
J5: Számláló visszaállítása. A gomb megnyomásakor a számláló nullázódik.
ISP csatlakozó: Ez egy 10 tűs csatlakozó az USBAsp AVR programozóhoz.
Készülék diagram
Fotó a kész készülékről





2. lehetőség: ATmega8 + 2x16 HD44780 LCD + 5 V tápegység
Néhány olvasóm olyan verziót kért a számlálóból, amely 2x16-os HD44780-as kijelzőt (vagy egy kisebb, 1x16-os változatot) használ. Ezek a kijelzők 5 V-os tápfeszültséget igényelnek, így a 3,3 V-os stabilizátor nem releváns.
Készülék diagram


Mikrokontroller konfigurációs bitjei mindkét opcióhoz: LOW - 0xFF, HIGH - 0xC9.
| Archívum a "Tekercsszámláló tekercsgéphez" cikkhez | |
| Leírás:
Forráskód (C), firmware fájlok a mikrokontrollerhez |
|
| Fájl méret: 111,35 KB Letöltések száma: 257 |
Történt, hogy kedvem támadt feltekerni a transzformátort, minden rendben lesz, de nem volt elég gépem - innen kezdődött minden! Egy internetes keresés talált néhány lehetőséget a szerszámgépgyártásra, de az zavart, hogy a fordulatok számlálása ismét egy sebességmérőből vagy egy régi magnóból vett mechanikus számlálóval, valamint számológépes reed kapcsolókkal történik. Hm…. Egyáltalán nem volt szükségem szerelőkre, egy métert tekintve, nincs szétszedhető sebességmérőm, és nincs plusz számológépem sem. Igen, és ahogy elvtárs mondta. Serega a RadioKat-től: " Jó elektronikai mérnökök, gyakran rossz szerelők! Lehet, hogy nem én vagyok a legjobb elektronikai mérnök, de az biztos, hogy egy silány szerelő vagyok.
Ezért úgy döntöttem, hogy felkorbácsolok egy elektronikus mérőórát, és a készülék teljes mechanikai részének fejlesztését a családra bízom (szerencsére apám és bátyám ászok a mechanikában).
Miután felmértem az egyik helyet a másikra, úgy döntöttem, hogy 4 számjegyű mutató elég lesz nekem - ez nem sok - nem kevés, hanem 10 000 fordulat. Az egész zűrzavart egy kontroller fogja irányítani, de nekem úgy tűnt, hogy a kedvenc ATtiny2313-am és ATmega8-am abszolút nem volt jó, hogy beledugjak egy ilyen értéktelen készülékbe, a feladat egyszerű és egyszerűen meg kell oldani. Ezért az ATtiny13-at fogjuk használni - talán a leg"halottabb" MK-t, ami ma kapható (PIC-et és MCS-51-et nem veszek fel - csak ezeket tudom programozni, de nem tudom, hogyan kell hozzájuk programokat írni) . Ennek a kislánynak nincs elég lába, így senki sem akadályoz meg minket abban, hogy műszakregisztereket csatoljunk hozzá! Úgy döntöttem, hogy sebességérzékelőként Hall-érzékelőt használok.
Felvázoltam egy diagramot:
A gombokat nem említettem azonnal – de hol lennénk ezek nélkül? Akár 4 darab a visszaállításon (S1) kívül.
S2 - bekapcsolja a tekercselési módot (az üzemmód alapértelmezés szerint be van állítva) - a tekercs tengelyének minden egyes fordulatával 1-gyel növeli a fordulatok számát
S3 - tekercselési mód, ennek megfelelően minden fordulattal 1-gyel csökkenti az értéket. A maximumot "0"-ig tekerheti - nem mínuszra tekercsel :)
S4 - EEPROM-ban tárolt információk olvasása.
S5 - az aktuális érték + mód írása az EEPROM-ba.
Természetesen ne felejtsük el megnyomni a tekercselés gombot, ha tekercselni készülünk, különben ellapulnak. Lehetett 1 helyett 3 hall szenzort vagy valcodert beszerelni és a vezérlőprogramot úgy módosítani, hogy az maga választja meg a forgásirányt, de szerintem ez ebben az esetben felesleges.
Most nem sok a séma szerint:
Mint látható, nincs benne semmi természetfeletti. Mindezt a szégyent 5V táplálja, az áram 85mA körül fogyaszt valamit.
A TLE4905L hall szenzorból (meg lehet próbálni másikat bedugni, én az „ami olcsóbb és elérhető”) elve alapján választottam, a jel a vezérlőhöz kerül, megszakítás generálódik és az aktuális érték változik, attól függően, hogy a kiválasztott módot. A vezérlő információkat küld a váltási regisztereknek, ahonnan viszont a hétszegmenses jelzőkhöz vagy a billentyűzethez kerül. Hétszegmenses anódokat használtam közös katóddal, egyből kvartettem volt egy tokban, de senki nem zavarja azokat, akik 2 db dupla vagy 4 db párhuzamosan kapcsolt szimpla anódot akarnak felcsavarni. Az indikátorokon lévő pont nem használatos, ezért a H (dp) tű a levegőben lóg. Az indikátorok dinamikus üzemmódban működnek, így az R3-R9 ellenállása kisebb, mint a számított érték. Az indikátorok illesztőprogramjai a VT1-VT4 tranzisztorokra vannak felszerelve. Lehetett speciális mikroáramköröket használni, mint például az ULN2803, de a tranzisztorok mellett döntöttem, azon egyszerű oknál fogva, hogy felhalmoztam őket - „mint a kosz”, néhányuk idősebb nálam.
Gombok S2-S4 - a la mátrix billentyűzet. A gombok „kimenetei” ugyanazokon a vezetőkön lógnak, mint a regiszterbemenetek, tény, hogy a vezérlőtől a regiszterekbe való adatküldés után az SHcp és Ds bemeneteken bármilyen szintű jel lehet, és ez nem bármilyen módon befolyásolják a nyilvántartások tartalmát. A gombok „bemenetei” a regiszterek kimenetein lógnak, az információátadás megközelítőleg a következőképpen történik: először a vezérlő információkat küld a regisztereknek, hogy később továbbítsa a jelzőkhöz, majd információkat küld a gombok átvizsgálásához. Az R14-R15 ellenállások szükségesek a regiszterek/vezérlők lábai közötti „harcok” elkerüléséhez. Az információ küldése a kijelzőre és a billentyűzet pásztázása magas frekvencián történik (a Tini13 belső generátora 9,6 MHz-re van állítva), ennek megfelelően, akármilyen gyorsan próbáljuk megnyomni és felengedni a gombot, a megnyomás ideje alatt sok művelet lesz, és ennek megfelelően a gomb nullája a vezérlőtől a találkozóhoz fog futni. Nos, olyan kellemetlen dolog, mint a gombérintkezők ismételt zörgése.
Az R16-R17 ellenállások segítségével a + tápra húzzuk a billentyűzetünket, hogy üresjáratban 1 és ne Z állapot jöjjön a billentyűzet kimeneteiről a vezérlő bemeneteire, ami téves pozitív eredményhez vezet. Meg lehetett csinálni ezeket az ellenállásokat; elég elég belső felhúzó ellenállás van az MK-ban, de nem tudtam rávenni magam, hogy eltávolítsam őket - Isten óvja az óvatosakat.
A séma szerint ez minden, az érdeklődőknek adok egy listát az alkatrészekről. Azonnal hadd tegyek egy fenntartást, hogy a felekezetek egyik vagy másik irányban eltérhetnek.
Az IC1 egy ATtiny13 mikrokontroller, V betűvel használható. A SOIC változat pinoutja megegyezik az ábrán láthatóval. Ha valakinek van kedve QFN/MLF használatára a tokban, az adatlap a kezében lesz.
IC2-IC3 - 8 bites shift regiszterek reteszeléssel a kimeneten - 74HC595, a kenyérpanelen DIP csomagokban használtam a kész eszközben lévő táblán SOIC-ban. A kivezetés ugyanaz.
Az IC4 egy digitális egypólusú Hall érzékelő, TLE4905L. A huzalozás az adatlap szerint R2 - 1k2, C2-C3 by 4n7. Amikor az érzékelőt a gépre szereli, ellenőrizze, hogy a mágnes melyik oldalára reagál.
A C1, C4 és C5 tápegység szűrőkondenzátorok, egyenként 100n-t szereltem be, a mikroáramkörök tápcsapjaihoz a lehető legközelebb kell elhelyezni.
R1 - egy ellenállással húzzuk a reset lábat a tápegységhez, 300 Ohm - és így tovább. 1k fogadok.
R3-R9 - áramkorlátozó ellenállások indikátorokhoz. 33 Ohm - 100 Ohm, minél nagyobb az ellenállás, annál halványabb lesz a fény.
R10-R13 - korlátozza az áramot a tranzisztor alapáramkörökben. A kenyérsütőtáblán 510 Ohm volt, a táblába pedig 430 Ohmot csavartam.
VT1-VT4 - KT315 bármilyen betűindexszel, helyettesíthető KT3102, KT503 és analógokkal.
Az R14-R15, ahogy fentebb is írták, a “verekedés” megelőzése érdekében szerintem 1k-tól és feljebb is lehet állítani, de 4k7 fölé ne emeljük. 300 Ohm R16-R17-nél a sorba kapcsolt ellenállások összellenállása nem haladhatja meg az 5k-t, kísérleteim során 5k feletti ellenállásnál téves gombválaszok jelentek meg.
Miután ellenőriztük a mérőműszer működését a kenyérsütőtáblán, itt az ideje, hogy a hardvert „komplett eszközzé” állítsuk össze.
A tábla SL-ben volt kirakva, és nagy valószínűséggel nem optimálisan rakták ki - igazítottam a meglévő alkatrészekhez, lusta voltam a piacra másokat vásárolni. Általában kiterítettem és fekete-fehér lézernyomtatókhoz való átlátszó egyoldalas Lomond fóliára nyomtattam. Nyomtatott negatívban, 2 példányban. Negatív - mert a PP-t filmes fotoreziszttel akartam elkészíteni, és az viszont NEGATÍV. És 2 példányban – így kombinálva a legátlátszatlanabb festékréteget kapja. Nekem sincs kedvem aeroszolos dobozhoz ÁTLÁTSZÓ 21
megvesz.
A fotómaszkokat kombináljuk, „fénynek” kitéve, hogy a lyukak tökéletesen illeszkedjenek, és rögzítsük őket egy szokásos tűzővel - ezt az eljárást felelősségteljesen kell megközelíteni, a jövőbeli tábla minősége nagyban függ tőle.
Most el kell készítenünk a fólia PCB-t. Vannak, akik finom csiszolópapírral, mások radírral dörzsölik át, de mostanában a következő lehetőségeket részesítem előnyben:
1. Ha a réz nem szennyeződött túl oxidokkal, akkor ammóniába mártott tamponnal törölje le - ó, büdös szemét, megmondom, nem szeretem ezt a tevékenységet, de gyors. Ideális esetben a réz nem fog fényleni ezután, hanem az alkohol lemossa az oxidokat, és a tábla maratott lesz.
2. Ha elég koszos a réz, filckoronggal polírozom. Felakasztom a fúróra, és íme. Itt nem kell különösebben buzgólkodni, nem használok GOI pasztát, a későbbi maratáshoz elég egy filckör. Gyors és hatékony.
Általában elkészítettük - nem tudok fotót feltenni, a fertőzés tükörként ragyog, és semmi sem látszik a képen, én is egy tetves fotós vagyok.
Nos, oké, akkor tekerjük a fotorezisztet.
Be kell vallanom, hogy a fotorezisztem lejárt a lejárati dátumán, és a kutya nem hajlandó ragaszkodni a táblához, ezért először fel kell melegítenem a táblát. Hajszárítóval melegítem, de lehet vasalót is használni. Természetesen jó lenne egy laminálógép erre a célra, de:
- a tésztát most sajnálom őt
- amikor nem bántam a tésztát, akkor ostobán lusta voltam :)
A fotorezisztet feltekerjük a forró deszkára, ne felejtsük el eltávolítani a védőfóliát. Igyekszünk ezt a lehető legkörültekintőbben megtenni, hogy ne legyenek légbuborékok a tábla és a fotoreziszt között. A velük való küzdelem később külön szamár. Ha buborékok jelennek meg, tűvel megszúrom.
Bármilyen világításban gurulhat, és nem vesz részt a szarban, emlékezve az amatőr fotósokra, üzletünkben a legfontosabb a napfény és az ultraibolya sugárzás egyéb forrásainak hiánya.
A recézés után forró vasalóval átmelegítem a deszkát egy újságpapíron keresztül, ez meggyógyítja a kilyukadt buborékokat, a fotoreziszt pedig szorosan tapad.
Ezután a táblára tesszük a sablont, itt a tábla kétoldalas, így a sablon a tábla mindkét oldalán lesz. Ezt a „szendvicset” egy plexilapra helyezzük, és a második lappal rányomkodjuk. 2 lapra van szükség, hogy az egyik oldal exponálása után óvatosan megfordíthasd a táblát a fotómaszk mozgatása nélkül.
Világítsuk meg a másik oldalról. Én ezt a lámpát használom:
Kb. 150mm távolságból világítok 7 percig (a távolságot és az időt kísérletileg választjuk ki).
Ezután készítsen egy gyenge lúgos oldatot - egy teáskanál szódát fél liter vízre. A víz hőmérséklete nem fontos. Addig keverjük, amíg az összes szóda fel nem oldódik. Ez az oldat nem veszélyes a kezére, tapintásra olyan, mint a szappanos víz.
Távolítjuk el a védőfóliát a deszkánkról, és beledobjuk az oldatba, majd aktívan elkezdjük dörzsölni egy kefével - de ne nyomja meg túl erősen, hogy ne szakítsa le a nyomokat. Természetesen nem dörzsölheti, de akkor van lehetőség a fotoreziszt lemosására:
- hosszú ideje
- minden el lesz mosva
de nekünk sem az egyik, sem a másik nem illik, ezért három.
valami hasonlót kapunk:
Öblítsük le a táblát vízzel, ne öntsük ki az oldatot - később szükségünk lesz rá. Ha a tábla fejlesztése során néhány nyom levált, vagy légbuborékok rontották el a pályákat, akkor ezeket a helyeket tsapon lakkal vagy speciális jelölővel kell retusálni. Ezután maratjuk a táblát. Én vas-kloridot használok.
A maratást követően ismét leöblítjük vízzel a táblát és visszaöntjük a lúgos oldatba, hogy lemossuk a már nem szükséges fotorezisztet. Egy óra elég.
Ezután bolondozunk. Kis áramköri lapokhoz vagy nagyon ékszeresekhez Rose ötvözetet használok, áramköri lapoknál egyszerűen bekenem az ónt az áramköri lapra egy lapos hegyű forrasztópákával. Ebben az esetben érdemes a táblát fluxussal bevonni, én szokásos alkoholos gyantát használok.
Lehet, hogy egyeseknek úgy tűnhet, hogy az utak nem jöttek ki túl simán - a pályák simán jöttek ki :) ez a forrasztópákával végzett ónozás költsége, a bádog nem fekszik egyenletesen.
A kész verzióban nincs reset gomb - nos, nem volt hova ragasztani a táblára, így nincs elég hely, és ha az MK lefagy, akkor kikapcsolom és újra bekapcsolom. Egy dióda is megjelent az áramkörben - védelem a polaritás megfordítása ellen. Ami a többi alkatrészt illeti, csak azokat használtam, amelyek kéznél voltak, ezért van SMD és normál eset is.
Érzékelőt rögzítünk a gép álló részéhez, és mágnest szerelünk a forgástengelyre úgy, hogy forgáskor 3-5 mm-re elhaladjon az érzékelőtől. Na, használjuk :)
Most már ennyi, köszönöm mindenkinek a figyelmet, és elvtársak GP1És Avreal fejlesztésben való segítségért.
Sok háztartási gép és ipari automatizálási eszköz, amely viszonylag közelmúltbeli gyártási évet gyártott, mechanikus számlálóval rendelkezik. Ezek szállítószalagon lévő termékek, tekercselőgépek huzalfordulatai stb. Meghibásodás esetén nem könnyű hasonló mérőt találni, és pótalkatrészek hiánya miatt nem is lehet javítani. A szerző azt javasolja, hogy a mechanikus számlálót elektronikusra cseréljék. A mechanikus helyettesítésére kifejlesztett elektronikus számláló túl bonyolultnak bizonyul, ha alacsony és közepes integrációs fokú mikroáramkörökre épül (például a K176, K561 sorozat). különösen, ha fordított számlára van szükség. És annak érdekében, hogy az eredményt a kikapcsolás után is megőrizze, tartalék akkumulátort kell biztosítani.De számlálót csak egyetlen chipre építhet - egy univerzális programozható mikrokontrollerre, amely számos perifériás eszközt tartalmaz, és nagyon sokféle probléma megoldására képes. Sok mikrokontroller rendelkezik egy speciális memóriaterülettel - EEPROM. A beleírt adatok (beleértve a programvégrehajtás során is), például az aktuális számlálási eredmény a kikapcsolás után is mentésre kerülnek.
A javasolt számláló az Almel AVR családjának Attiny2313 mikrokontrollerét használja. A készülék fordított számlálást valósít meg, az eredményt a jelentéktelen törlésével jeleníti meg
kaptár egy négyjegyű LED kijelzőn, amely az eredményt az EEPROM-ban tárolja, amikor a tápellátást kikapcsolják. A mikrokontrollerbe épített analóg komparátort használnak a tápfeszültség csökkenésének időben történő észlelésére. A számláló megjegyzi a számlálás eredményét az áramellátás kikapcsolásakor, visszaállítja azt bekapcsoláskor, és hasonlóan a mechanikus számlálóhoz, reset gombbal van ellátva.
A számláló áramkör az ábrán látható. A B port hat sora (РВ2-РВ7) és a D port öt sora (PDO, PD1, PD4-PD6) szolgál a számlálási eredmény dinamikus jelzésének megszervezésére a HL1 LED-jelzőn. A VT1 és VT2 fototranzisztorok kollektorterhelései a mikrokontrollerbe épített ellenállások, amelyeket olyan szoftver engedélyez, amely a mikrokontroller megfelelő érintkezőit a tápáramköréhez köti.
Az N számlálási eredmény eggyel növekszik a VD1 emittáló dióda és a VT1 fototranzisztor közötti optikai kapcsolat megszakadásakor, ami növekvő szintkülönbséget hoz létre a mikrokontroller INT0 bemenetén. Ebben az esetben az INT1 bemenet szintjének alacsonynak kell lennie, azaz a VT2 fototranzisztort a VD2 emittáló diódával kell megvilágítani. Abban a pillanatban, amikor az INT1 bemeneten emelkedik a differenciál, az INT0 bemeneten pedig alacsony szint lesz, az eredmény eggyel csökken. A szintek egyéb kombinációi és azok különbségei az INT0 és INT1 bemeneteken nem változtatják meg a számlálás eredményét.
A 9999-es maximális érték elérése után a számlálás nullától folytatódik. A nulla értékből egyet levonva 9999 az eredmény. Ha nincs szükség visszaszámlálásra, akkor a VD2 emittáló diódát és a VT2 fototranzisztort kizárhatja a számlálóból, és a mikrokontroller INT1 bemenetét a közös vezetékre csatlakoztathatja. A szám csak tovább fog növekedni.
Mint már említettük, a tápfeszültség csökkenésének érzékelője a mikrokontrollerbe épített analóg komparátor. Összehasonlítja az egyenirányító kimenetén lévő nem stabilizált feszültséget (VD3 diódahíd) a beépített DA1 stabilizátor kimenetén lévő stabilizált feszültséggel. A program ciklikusan ellenőrzi a komparátor állapotát. Miután a mérőt leválasztják a hálózatról, az egyenirányító szűrőkondenzátorának C1 feszültsége leesik, és a stabilizált feszültség egy ideig változatlan marad. Az R2-R4 ellenállások a következők szerint vannak kiválasztva. hogy a komparátor állapota ebben a helyzetben fordított. Ezt észlelve a program még azelőtt kiírja az aktuális számlálás eredményét a mikrokontroller EEPROM-jába, mielőtt az áramszünet miatt leállna. A következő bekapcsoláskor a program beolvassa az EERROM-ban írt számot és megjeleníti a jelzőn. A számolás ettől az értéktől folytatódik.
A mikrokontroller tűinek korlátozott száma miatt a számlálót nullázó SB1 gomb csatlakoztatásához a 13-as érintkezőt használták, amely a komparátor (AIM) invertáló analóg bemeneteként és egyúttal „digitális” bemeneteként is szolgál. PB1. A feszültségosztó (R4, R5 ellenállások) itt logikailag magasra állítja a mikrokontroller által érzékelt szintet, amely az SB1 gomb megnyomására alacsony lesz. Ez nem befolyásolja a komparátor állapotát, mivel az AIN0 bemenet feszültsége még mindig nagyobb, mint az AIN1.
Az SB1 gomb megnyomásakor a program az indikátor minden számjegyében mínuszjelet jelenít meg, majd elengedése után nullától kezdi a számolást. Ha a gomb lenyomása közben lekapcsolja a mérőműszert, az aktuális eredmény nem kerül az EEPROM-ba, és az ott tárolt érték változatlan marad.
A program úgy van megtervezve, hogy könnyen illeszthető legyen a mérőhöz más mutatókkal (például közös katódokkal), eltérő nyomtatott áramköri elrendezéssel stb. A program enyhe korrekciója akkor is szükséges kvarc rezonátor használata a megadott frekvenciától 1 MHz-nél nagyobb mértékben eltérõ frekvenciára.
Ha a forrásfeszültség 15 V, mérje meg a feszültséget a mikrovezérlő panel 12. és 13. érintkezőjén a közös vezetékhez (10. érintkező) viszonyítva. Az elsőnek a 4...4,5 V tartományban kell lennie, a másodiknak pedig több, mint 3,5 V, de kisebb, mint az első. Ezután a forrás feszültsége fokozatosan csökken. Amikor 9...10 V-ra csökken, a 12-es és 13-as érintkezőknél a feszültségértékek különbségének nullává kell válnia, majd előjelet kell váltania.
Most már telepítheti a programozott mikrokontrollert a panelbe, csatlakoztathatja a transzformátort és rákapcsolhatja a hálózati feszültséget. 1,5...2 mp után meg kell nyomni az SB1 gombot. A számláló kijelzőjén a 0 szám jelenik meg. Ha semmi nem jelenik meg a kijelzőn, ellenőrizze újra a feszültségértékeket a mikrokontroller AIN0.AIN1 bemenetein. Az elsőnek nagyobbnak kell lennie, mint a másodiknak.


Ha a számláló sikeresen elindult, már csak a számlálás helyességét kell ellenőrizni oly módon, hogy a fototranzisztorokat váltakozva árnyékoljuk egy IR-sugarak számára átláthatatlan lemezzel. A nagyobb kontraszt érdekében célszerű az indikátorokat piros szerves üvegszűrővel letakarni.

Továbbá, ha valaki kvarc nélkül szerel össze egy mérőt az Atiny2313-on,
A biztosítékokat így programoztam
ASM forrás
Firmware
Minden rádióamatőr vagy hangvisszaadó berendezések iránt érdeklődő rajongó számára a tekercselőgép rendkívül népszerű berendezés. Az ilyen eszközöket transzformátorok egyrétegű és többrétegű hengeres tekercseinek tekercselésére használják.
Ebben a cikkben megvizsgáljuk a tekercselőgép kialakítását és működési elvét, és megfontoljuk a lépésről lépésre szóló utasításokat is, amelyek alapján saját kezűleg készíthet ilyen berendezéseket.
1 Felépítés és működési elv
A tekercselőgép nélkülözhetetlen a hasonló termékek előállításához. Az ilyen egységek két típusa létezik - automatikus és kézi, míg az utóbbiak gyakorlatilag nem általánosak az ipari szektorban a korlátozott funkcionalitás miatt.
Az automata csévélők méretei, nagy súlya és költsége azonban alkalmatlanná teszik őket a mindennapi életben, ezért érdemesebb kézi gépet beszerezni otthonába. Egy ilyen eszköz szabványos kialakítása a következő elemekből áll:
- két függőleges fémből vagy fából készült oszlopból álló tartókeret, amelyek között vízszintes tengelyek vannak rögzítve (a központi oszlopon - a kerékkel ellátott lemezekhez, a külsőn - magának a tekercsnek);
- nagy és kis fogaskerekek, amelyek a nyomatékot továbbítják az orsóhoz;
- egy nagy fogaskerékre rögzített fogantyú, amelyen keresztül az orsóval ellátott tengely forog;
- rögzítő elemek - csavarok és anyák.
![]()
Egy ilyen eszköz működési elve rendkívül egyszerű - a fogantyú elforgatása egy huzal vagy kábel forgó keretre történő tekercseléséhez vezet; a felrakóvezető, amely a huzalt vízszintes síkban mozgatja, felelős a tekercselés egyenletességéért.
A fordulatok számának nyomon követése vizuálisan és speciális számlálók segítségével is elvégezhető, amelyek közül a legegyszerűbb egy hagyományos kerékpár kilométer-számláló. A fejlettebb gépeknél speciális mágneses reed érzékelőt használnak számlálóként.
1.1 Magazingépek
Az ipari tekercselő egységek közül az SRN-05M3 kábeltekercselő gép széles körben népszerű. Ezt a modellt a szovjet korszakban helyezték üzembe, és azóta nagy megbízhatóságának és teljesítményének köszönhetően jól bevált. A másodlagos piacon az SRN-05M3 15-20 ezer rubelért található.

Az SRN-05M3 öntöttvasból készül, a berendezés súlya 80 kg, méretei 877 * 840 * 142 cm A gép lehetővé teszi egyrétegű, kétrétegű és toroid tekercsek tekercselését automatikus fektetési módban. A kábel minimális átmérője 0,05 mm, a maximális 0,5 mm. Az egység UL-62 típusú egyfázisú villanymotorral van felszerelve, melynek teljesítménye 0,18 kW. A legnagyobb fordulatszám tekercselés közben 5100 ford./perc.

Háztartási használatra a legjobb választás az NZ-1 (Kína) kézi gép. A származási ország ellenére az NZ-1 meglehetősen megbízható és funkcionális berendezés. Az egységet legfeljebb 150 mm átmérőjű, legfeljebb 100 mm szélességű tekercsek tekercselésére tervezték. Az áttétel gyors tekercselésben 1:08, lassú tekercselésben 1:0,1. Maximális fordulatszám - legfeljebb 1000 fordulat / perc.
Az NZ-1 mechanikus menetszámlálóval van felszerelve. A test fémből, a tartókeret öntöttvasból készült. A gép szíjtárcsával van felszerelve, amely lehetővé teszi, hogy szíjhajtáson keresztül elektromos motort csatlakoztasson hozzá, és automata üzemmódban működjön. Az ilyen berendezések költsége 4-5 ezer rubel között változik.
1.2 Házi tekercselőgép (videó)
2 Tekercselőgép készítése saját kezűleg
A cikk ebben a szakaszában bemutatott kábeltekercselő gép lehetővé teszi, hogy tekercsekkel dolgozzon négyzetes, kerek és téglalap alakú kereten, amelynek átlója legfeljebb 200 mm; felszerelhető különféle csigákkal, amelyek lehetővé teszik a tekercselés megváltoztatását osztása 0,3-3,2 mm között van.

Az alábbi ábra a gép vázát mutatja. A keret összeszereléséhez 15 mm (alap) és 5 mm (oldalsó részek) vastagságú fémlemezeket használnak. A fémvastagság megtakarítása nem üdvözlendő, mivel ez az egység súlyának csökkenéséhez és ennek következtében a stabilitás romlásához vezet.
Ki kell vágnia a keretdarabokat (a méreteket be kell tartani), és két átmenő lyukat kell fúrnia bennük, majd az oldalakat az alaplemezhez kell hegeszteni. Az alsó furatba 2 csapágyat kell szerelni, a felső lyukba pedig a forgótengely perselyeit.

Tengelyként egy 12 mm-es sima merevítő rudat használhat, amelyet először csiszolni és festeni kell. A felrakóhüvelyhez 10 mm átmérőjű rudat vehet fel, amelynek teljes hosszában egy szabványos M12 * 1,0 menetet vágunk.

Jobb, ha hármas szíjtárcsákat készítünk, de ne feledjük, hogy teljes vastagságuk nem haladhatja meg a 20 mm-t. Nagyobb vastagság esetén a tengelyek hosszát hasonló mérettel meg kell növelni. A diagramon feltüntetett szíjtárcsák kombinációja 54 különböző tekercselési lépés alkalmazását teszi lehetővé. Ha 0,31 mm-nél kisebb átmérőjű vezetékekkel kell dolgozni, akkor szükség lesz egy további 12/16/20 mm-es szíjtárcsára, amellyel 0,15 mm-es vezetékeket tekerhet fel.

A kézi hajtás felépítéséhez nagy fogaskerékre és fogantyúra lesz szüksége, amelyeket a felső tengelyen lévő befogóbilincs segítségével rögzítenek. A befogópatron használatának köszönhetően szükség esetén a fogantyú rögzítésével megszakíthatja a tekercselést, ezzel megakadályozva az orsó letekeredését.
A tekercselőgép menetszámlálója egy szokásos számológépből készül. Szüksége lesz egy nádérzékelővel ellátott mágnesre is (bármely rádiókészülék boltban megvásárolható), amelynek vezetékeit a „=” gombon lévő számológép érintkezőihez kell csatlakoztatni.
2.1 Hogyan dolgozzunk házi készítésű gépen?
Tehát a berendezés készen áll, hogyan kell dolgozni rajta? A tekercskeret felszereléséhez a felső tengelyt a rögzítőaljzattól a keret hosszával megegyező hosszúságúra kell meghosszabbítani. Ezután a jobb oldali tárcsa és a tekercs tüske a tengelyre van felszerelve, amelyre maga a tekercs kerül. A következő lépés a bal oldali lemez felszerelése és az anyacsavarozása, majd minden az eredeti helyére kerül.

A felső tengelyen lévő furatba egy szöget helyeznek, és a keretet középre állítják, majd a keretet anyával rögzítik. A további műveleteket a következő sorrendben hajtjuk végre:
- Egy megfelelő átmérőjű szíjtárcsát helyezünk az előtoló tengelyre.
- A szíjtárcsa forgatásával a rakodó a szélső helyzetbe, az orsó egyik oldalára mozog.
- A szíjtárcsára drótszíjat helyeznek - gyűrűben vagy nyolcas alakban. A huzal végét be kell csavarni a középső tengely alá, be kell helyezni a rakodó csúszdába és rögzíteni kell a kerethez. A huzal feszességét a fogantyún lévő bilincsekkel lehet beállítani.
- A tekercselés elején az „1+1” kombinációt írjuk be a számológépbe, majd a fogantyút elforgatjuk. A tengely minden egyes teljes fordulatánál a számológép önállóan eggyel növeli a képernyőn látható számot, ezáltal megszámolja a huzal fordulatainak számát.
Mivel ennek a berendezésnek egy rendkívül egyszerű eszköze van, amely nem rendelkezik semmiféle tekercselőgép vezérlővel, működés közben folyamatosan figyelnie kell az orsót, és szükség esetén kézzel kell beállítania a kereten lévő kábelt.

Ha funkcionálisabbá szeretné tenni a gépet, akkor bonyolítania kell a tervezést egy vezérlő hozzáadásával. Ez lehetővé teszi a munkafolyamat automatizálását, azonban a teljesen mechanikus párosításhoz léptetőmotort kell beszerelni a vezérlőbe (egy szokásos 24 voltos hajtás, amely fordulatonként 44-60 lépésben működik). A készlet teljesítménytranzisztorait a motor jellemzői alapján választják ki. Az ATmega8 készülék ideális vezérlőként, 150-200 rubelért megvásárolhatja.