Вывод уравнения продольных колебаний упругого стержня. Современные проблемы науки и образования
Стержнем называют тело, один из размеров которого, называемый продольным, значительно превышает его размеры в плоскости, перпендикулярной к продольному направлению, т.е. поперечные размеры. Основным свойством стержня является сопротивление, оказываемое продольному сжатию (растяжению) и изгибу. Это свойство коренным образом отличает стержень от струны, которая не растягивается и не сопротивляется изгибу. Если плотность материала стержня во всех его точках одинакова, то стержень называют однородным.
Обычно в качестве стержней рассматриваются протяженные тела, ограниченные замкнутой цилиндрической поверхностью. В этом случае площадь поперечного сечения остается постоянной. Мы будем изучать поведение именно такого однородного стержня длины l , предполагая, что он подвержен только сжатию или растяжению, подчиняясь при этом закону Гука. При изучении малых продольных деформаций стержня обычно принимается так называемая гипотеза плоских сечений. Она заключается в том, что поперечные сечения, перемещаясь при сжатии или растяжении вдоль стержня, остаются плоскими и параллельными друг другу.
Направим ось x вдоль продольной оси стержня (Рис. 19) и будем считать, что в начальный момент времени концы стержня находятся в точках x=0 и x=l . Возьмем произвольное сечение стержня с координатой x . Обозначим через u (x , t ) смещение этого сечения в момент времени t , тогда смещение сечения с координатой в тот же момент времени будет равно
![]()
Тогда относительное удлинение стержня в сечении x будет равно
Сила сопротивления этому удлинению по закону Гука будет равна
где E – модуль упругости материала стержня (модуль Юнга), а S – площадь поперечного сечения. На границах участка стержня длиной dx на него действуют силы T x и T x + dx , направленные вдоль оси x . Результирующая эти их сил будет равна
![]() ,
,
а ускорение рассматриваемого участка стержня равно , тогда уравнение движения этого участка стержня будет иметь вид:
![]() , (67)
, (67)
где ρ – плотность материала стержня. Если эта плотность и модуль Юнга, постоянны, то можно ввести величину через и, поделив обе части уравнения на Sdx , окончательно получить уравнение продольных колебаний стержня в отсутствии внешних сил
![]() (68)
(68)
Это уравнение по форме совпадает с уравнением поперечных колебаний струны и методы решения для него те же, однако, коэффициентом a в этих уравнениях обозначены разные величины. В уравнении струны величина a 2 представляет дробь,в числителе которой стоит постоянная сила натяжения струны – Т , а в знаменателе линейная плотность ρ , а в уравнении струныв числители стоит модуль Юнга, а в знаменателе – объемная плотность материала стержня ρ . Отсюда и физический смысл величины a в этих уравнениях разный. Если для струны этот коэффициент является скоростью распространения малого поперечного смещения, то для стержня он является скоростью распространения малого продольного растяжения или сжатия и называется скоростью распространением звука , поскольку именно с этой скоростью будут распространяться по стержню малые продольные колебания, представляющие собой звук.
Для уравнения (68) задаются начальные условия, которые определяют смещение и скорость смещения любого сечения стержня в начальный момент времени:
Для ограниченного стержня задаются условия закрепления или приложения силы на его концах в виде граничных условий 1-го, 2-го и 3-го рода.
Граничные условия первого рода задают продольное перемещение на концах стержня:
Если концы стержня закреплены неподвижно, то в условиях (6) ![]() . В этом случае, так же как и в задаче о колебании защемленной струны применим метод разделения переменных.
. В этом случае, так же как и в задаче о колебании защемленной струны применим метод разделения переменных.
В граничных условиях II рода на концах стержня задаются упругие силы, образующиеся в результате деформации по закону Гука в зависимости от времени. Согласно формуле (66) эти силы с точностью до постоянного множителя равны производной u x , поэтому на концах и задаются эти производные как функции времени:
Если один из концов стержня свободен, то на этом конце u x = 0.
Граничные условия третьего рода могут быть представлены как условия, при которых к каждому концу стержня прикреплена пружина, другой конец которой перемещается вдоль оси по заданному закону времени θ (t ), как это изображено на Рис. 20. Эти условия могут быть записаны следующим образом
 , (72)
, (72)
где k 1 и k 2 – жесткости пружин.

Если на стержень вдоль оси действует ещё и внешняя сила p (x , t ), рассчитанная на единицу объема, то вместо уравнения (50) следует записать неоднородное уравнение
![]() ,
,
Которое, после деления на примет вид
![]() , (73)
, (73)
где ![]() . Уравнение (73) представляет собой уравнение вынужденных продольных колебаний стержня, которое решается по аналогии с уравнением вынужденных колебаний струны.
. Уравнение (73) представляет собой уравнение вынужденных продольных колебаний стержня, которое решается по аналогии с уравнением вынужденных колебаний струны.
Замечание. Следует заметить, что и струна и стержень являются моделями реальных тел, которые в действительности могут проявлять как свойства струны, так и стержня, в зависимости от условий, в которых они находятся. Кроме того, в полученных уравнениях не учитываются силы сопротивления окружающей среды и силы внутреннего трения, в результате чего эти уравнения описывают незатухающие колебания. Для учета эффекта затухания в простейшем случае используется диссипативная сила, пропорциональная скорости и направленная в сторону, противоположную движению, т.е. скорости. В результате уравнение (73) принимает вид
![]() (74)
(74)
Обращаясь к основным дифференциальным уравнениям колебаний, мы заметим, что когда умножим их на – = к 2 , они будут содержать члены, из которых одни имеют коэффициентом квадрат скорости и поперечных колебаний, другие – квадрат скорости продольных колебаний.
Первыечлены в случае колебаний продольных должны исчезнуть из уравнений, и мы получаем первую группу:
Так как поверхность p по нашему выбору есть поверхность волны, то в уравнениях § 7 мы должны удержать одно колебание R и приравнять нулю колебания /?! и R. 2 , совершающиеся в плоскости, касательной к волне. Вследствие этого находим, полагая // =1:
Так как А = 0, то уравнения (1) примут вид:
Умножая первое из уравнений (2) на //i // 2 , дифференцируя по p и обращая внимание на уравнение (4), находим:
что по уравнениям (2) В не зависит ни от р х, ни от [–]. Следовательно, означая через &F частную производную от функции F по одной из переменных ^, р. 2 , мы получаем из уравнения (7):
Подставляя в это выражение величины Н 1 Н 2 , найденные в п.п. 3, приравнивая нулю коэффициенты при различных степенях, мы находим следующие условия, которым должна удовлетворять волновая Ф – я
Известно, что подобные соотношения имеют место только для сферы, круглого цилиндра и плоскости.
Отсюда имеем, что изотермические волновые поверхности могут распространять колебания продольные.
Итак, если поверхность сотрясения или начальная волна не принадлежат к поверхностям изотермических волн, то вблизи их колебания происходят смешанные , но на значительных расстояниях волна приближается к виду одной из изотермических волн, и в явлении обнаруживаются колебания продольные. СТОП!!!
Остается проинтегрировать приведенные дифференциальные уравнения для сферы, с использованием гармонических функций!!!
Эксперименты Теслы – гармонический осциллятор – недопустим!!!
Для сферы в координатах, уже нами употреблённых, мы имеем:
Дальнейшие преобразования несущественны и не приводятся, так как приводят к исходному уравнению , не имеющему физического смысла для солитоноподобных волн.
Найденные выводы одинаково применимы к явлениям света в телах однородных и притом в тех пределах приближения, которые имеют место в теории Буссинеска!?
Отсюда: «болевой момент» выявлен.
Н. Умов математический сборник, т. 5, 1870 г. .
Ещё одна «страшная» неопределённость
Рассуждая аналогично, можно было бы легко получить подобное же выражение и для магнитной энергии, а следовательно и для токов. Мы видим, что, даже настаивая на самой простой из формул, проблему локализации энергии по-прежнему не удаётся решить .
И то же самое имеем для потока энергии. Можно преобразовать движение текущей энергии произвольным образом, добавляя к вектору Пойнтинга другой вектор (u, v, w), обязанный удовлетворять лишь уравнению несжимаемых жидкостей
Являющаяся следствием общих уравнений, ничего к ним не добавляет.
Поэтому локализация энергии логически бесполезна (а иногда, вредна).
Но имеется аспект, в котором важно рассмотреть теорему Пойнтинга.
Основным фактом, из которого проистекает закон сохранения энергии, был и остаётся экспериментально найденный факт невозможности вечного движения , факт – независимо от наших идей, и может, быть отнесён к порциям энергии, которой должен обладать эфир в отсутствие материальных тел.
Закон сохранения энергии , в его классической форме W = Const , объясняет эту невозможность.
Теорема Пойнтинга , требующая возможности преобразования объёмного интеграла (отчасти произвольного) в поверхностный, выражает гораздо меньше. Она легко допускает создание вечного движения, не будучи способна показать его невозможность !
По сути, пока мы не введём гипотезу запаздывающих потенциалов , непрерывное выделение энергии сходящихся волн, приходящих из бесконечности, остаётся столь же вероятным, сколь и потеря энергии, наблюдаемая в действительности.
Если бы двигатель мог вечно забирать одну лишь энергию эфира, независимо от присутствия материальных тел, то могло бы существовать и вечное движение . Таким образом, становится ясно, что прежде чем принять формулу запаздывающих потенциалов, мы должны доказать, что ускоренная частица теряет энергию и в результате подвергается противодействию, пропорциональному производной ее ускорения .
Достаточно лишь изменить знак c , чтобы прийти к гипотезе сходящихся волн.
Тогда мы обнаружим , что знак вектора излучения также изменится, и новая гипотеза приведёт, скажем, в случае вибрирующей частицы, к постепенному увеличению амплитуды с течением времени, а в целом – к увеличению энергии системы?!
В Природе солитоны бывают:
– на поверхности жидкости первые солитоны, обнаруженные в природе, иногда считают таковыми волны цунами
– различные виды гидроудара
– звуковые ударные – преодоление «сверхзвука»
– ионозвуковые и магнитозвуковые солитоны в плазме
– солитоны в виде коротких световых импульсов в активной среде лазера
– предположительно, примером солитона является Гигантский гексагон на Сатурне
– можно рассматривать в виде солитонов нервные импульсы , .
Математическая модель, уравнение Кортевега-де Фриза.
Одной из простейших и наиболее известных моделей, допускающих существование солитонов в решении, является уравнение Кортевега-де Фриза:
u t + uu x + βu xxx = 0.
Одним из возможных решений данного уравнения является уединённый солитон :
но и здесь осцилятором является гармоническая функция где r , s ,α, U – некоторые постоянные.Теоремы неопределённости в гармоническом анализе
Гармонический осциллятор в квантовой механике – описывается уравнением Шредингера ,
(217.5)Уравнение (217.5) называется уравнением Шредингера для стационарных состояний.
Стационарные состояния квантового осциллятора определяются уравнением Шредингера вида
(222.2)
где Е – полная энергия осциллятора.
В теории дифференциальных уравнений доказывается, что уравнение (222.2) решается только при собственных значениях энергии
(222.3)Формула (222.3) показывает, что энергия квантового осциллятора квантуется.
Энергия ограничена снизу отличным от нуля, как и для прямоугольной «ямы» с бесконечно высокими «стенками» (сМ. § 220), минимальным значением энергии
E 0 = 1/2 ℏ w 0 . Существование минимальной энергии – называется энергией нулевых колебаний – является типичной для квантовых систем и представляет собой прямое следствие соотношения неопределенностей.
В гармоническом анализе принцип неопределённости подразумевает, что нельзя точно получить значения функции и её отображения Фурье – а значит и сделать точный расчёт .
То есть моделирование, генерация и аналогия с соблюдением принципов подобия процессов и форм в Природе, с применением гармонического осцилятора – не возможна.
Разных видов математических солитонов известно пока мало и все они не подходят для описания объектов в трехмерном пространстве, тем более процессов происходящих в Природе.
Например , обычные солитоны , которые встречаются в уравнении Кортевега–де Фриза, локализованы всего лишь в одном измерении, если его «запустить» в трехмерном мире, то он будет иметь вид летящей вперед бесконечной плоской мембраны, мягко говоря абракадабра!!!
В природе, такие бесконечные мембраны не наблюдаются, а значит, исходное уравнение для описания трехмерных объектов не годится.
Вот здесь и заключается ошибочность введения гармонических функций – осцилляторов, связи в случае смешанных колебаний. Связной закон подобия , , но это уже другая история, которая выведет, теорию солитонов из систематической неопределённости , .
Свободные колебания систем с распределённымипараметрами
Основная особенность процесса свободных колебаний систем с бесконечным числом степеней свободы выражается в бесконечности числа собственных частот и форм колебаний. С этим связаны и особенности математического характера: вместо обыкновенных дифференциальных уравнений, описывающих колебания систем с конечным числом степеней свободы, здесь приходится иметь дело с дифференциальными уравнениями в частных производных. Кроме начальных условий, определяющих начальные смещения и скорости, необходимо учитывать и граничные условия, характеризующие закрепление системы.
6.1. Продольные колебания стержней
При анализе продольных колебаний прямолинейного стержня (рис.67,а) будем считать, что поперечные сечения остаются плоскими и что частицы стержня не совершают поперечных движений, а перемещаются только в продольном направлении.
Пусть u - продольное перемещение текущего сечения стержня при колебаниях; это перемещение зависит от расположения сечения (координаты x ) и от времени t . Таким образом, есть функция двух переменных; её определение и представляет основную задачу. Перемещение бесконечно близкого сечения равно , следовательно, абсолютное удлинение бесконечно малого элемента равно (рис.67,б), а относительное его удлинение .
Соответственно продольная сила в сечении с координатой х может быть записана в виде
![]() ,(173)
,(173)
где жёсткость стержня при растяжении (сжатии). Сила N также является функцией двух аргументов – координаты х и времени t .
Рассмотрим элемент стержня, расположенный между двумя бесконечно близкими сечениями (рис.67,в). К левой грани элемента приложена сила N, а к правой – сила . Если обозначить через плотность материала стержня, то масса рассматриваемого элемента составляет . Поэтому уравнение движения в проекции на ось х
![]() ,
,
Учитывая(173)ипринимая A = const , получим
Следуя методу Фурье, ищем частное решение дифференциального уравнения (175) в виде
,(177)
т.е. предположим, что перемещение u можно представить в виде произведения двух функций, одна из которых зависит только от аргумента х , а другая только от аргумента t . Тогда вместо определения функции двух переменных u (x , t ) необходимо определять две функции X(x ) и T(t ), каждая из которых зависит только от одной переменной.
Подставив (177) в (174), получим
где штрихами обозначена операция дифференцирования по x , а точками – по t . Перепишем это уравнение таким образом:
Здесь левая часть зависит только от x,а правая – только от t . Для тождественного выполнения этого равенства (при любых x и t ) необходимо, чтобы каждая из его частей была равна постоянной, которую обозначим через :
; .(178)
Отсюда следуют два уравнения:
;![]() .(179)
.(179)
Первое уравнение имеет решение:
![]() ,(180)
,(180)
указывающее на колебательный характер, причём из (180) видно, что неизвестная величина имеет смысл частоты свободных колебаний.
Второе из уравнений (179) имеет решение:
![]() ,(181)
,(181)
определяющее форму колебаний.
Частотное уравнение, определяющее величину , составляется путём использования граничных условий. Это уравнение всегда трансцендентное и имеет бесконечное число корней. Таким образом, число собственных частот бесконечно, причём каждому значению частоты соответствует своя функция T n (t ), определяемая зависимостью (180), и своя функция Xn (x ), определяемая зависимостью (181). Решение (177) является лишь частным и не даёт полного описания движения. Полное решение получается путём наложения всех частных решений:
![]() .
.
Функции X n (x ) называются собственными функциями задачи и описывают собственные формы колебаний. Они не зависят от начальных условий и удовлетворяют условию ортогональности, которое при А=const имеет вид
![]() , если .
, если .
Рассмотрим некоторые варианты граничных условий.
Закреплённыйконец стержня (рис.68,а). В концевом сечении перемещение u должно быть равно нулю; отсюда следует, что в этом сечении
X=0(182)
Свободный конец стержня (рис.68,б). В концевом сечении продольная сила
(183)
должна тождественно равняться нулю, что возможно, если в концевом сечении X"=0.
Упругозакреплённый конец стержня (рис.68,в).
При
перемещении u
концевого стержня возникает
упругая реакция опоры ![]() , где С о - жёсткость опоры. Учитывая (183)
для продольной силы, получим граничное условие
, где С о - жёсткость опоры. Учитывая (183)
для продольной силы, получим граничное условие
еслиопора расположена на левом конце стержня (рис.68,в),и
если опора расположена на правом конце стержня (рис.68,г).

Сосредоточенная масса на конце стержня.
Развиваемая массой сила инерции:
![]() .
.
Так как, согласно первому из уравнений (179), , то сила инерции может быть записана в виде . Получаем граничное условие
![]() ,
,
если масса находится на левом конце (рис.68,д),и
![]() , (184)
, (184)
если масса связана с правым концом (рис.68,е).
Определим собственные частоты консольного стержня (рис.68,a").
Согласно (182) и (183), граничные условия
X=0при х=0;
X"=0 при х= .
Подставляя поочерёдно эти условия в решение (181), получим
Условие С0 приводит к частотному уравнению:
Корни этого уравнения
![]() (n=1,2,…)
(n=1,2,…)
определяют собственные частоты:
![]() (n=1,2,…).(185)
(n=1,2,…).(185)
Первая (низшая) частота при n=1:
![]() .
.
Вторая частота (при n=2):
Определим собственные частоты стержня с массой на конце (рис.68,е).
Согласно (182) и (184),имеем
X=0 при х=0;
![]() при х=
.
при х=
.
Подставляя эти условия в решение (181), получим:
D=0; ![]() .
.
Следовательно, частотное уравнение при учёте(176) имеет вид
![]() .
.
Здесь праваячасть представляет собой отношение массы стержня к массе концевого груза.
Для решения полученного трансцендентного уравнения необходимо воспользоваться каким-либо приближённым способом.
При и значения наиболее важного низшего корня будут соответственно 0.32 и 0.65 .
При малом отношении решающее влияние оказывает груз и хорошие результаты даёт приближённое решение
 .
.
Для стержней переменного сечения, т.е. при Аconst , из (173) и (174) получается уравнение движения в виде
![]() .
.
Это дифференциальное уравнение не поддаётся решению в замкнутом виде. Поэтому в подобных случаях приходится прибегать к приближённым методам определения собственных частот.
6.2. Крутильные колебания валов
Крутильные колебания валас непрерывно распределенной массой (рис.69,а) описываются уравнениями, которые по структуре полностью совпадают с приведенными выше уравнениями продольных колебаний стержней.

Крутящий моментМв сечении с абсциссой х связан с углом поворота дифференциальной зависимостью, аналогичной (173):
где J p -полярный момент инерции поперечного сечения.
В сечении, расположенном на расстоянии dx , крутящий момент равен (рис.69,б):
Обозначая через (где - плотность материала вала) интенсивность момента инерции массы вала относительно его оси (т.е. момент инерции единицы длины), уравнение движения элементарного участка вала можно записать так:
![]() ,
,
или подобно (174):
![]() .
.
Подставляя сюда выражение (186), приJp =const получим, аналогично (175):
![]() , (187)
, (187)
Общее решение уравнения (187), как и уравнения (175), имеет вид
![]() ,
,
![]() (188)
(188)
Собственные частоты и собственные функции при этом определяются конкретными граничными условиями.
В основных случаях закрепления концов аналогично случаю продольных колебаний получим
а) закрепленный конец (=0): Х=0;
б) свободный конец (М=0): Х"=0;
в) упругозакрепленный левый конец: СоХ=GJpX " (Со-коэффициент жёсткости);
г) упругозакрепленный правый конец: -СоХ=GJpX ";
д
) диск на левом конце: ![]() (Jo-момент инерции
диска относительно оси стержня);
(Jo-момент инерции
диска относительно оси стержня);
е) диск на
правом конце: ![]() .
.
Если вал закреплён на левом конце (х=0), а правый конец (х= ) свободен, то Х=0 при х=0 и Х"=0 при x= ; собственные частоты определяются аналогично (185):
![]() (n=1,2,…).
(n=1,2,…).
Если левый конец закреплён, а на правом конце имеется диск, получим трансцендентное уравнение:
![]() .
.
Если оба конца вала закреплены, то граничные условия будут X=0 при х=0 и х= . В этом случае из (188) получим
т.е.
(n=1,2,…),
отсюда находим собственные частоты:
Если левый конец вала свободен, а на правом конце имеется диск, то X"=0 при х=0 ;Jo X=GJpX "при х= .
При помощи (188) находим
С=0; ![]() ,
,
или трансцендентное частотное уравнение:
 .
.
6.3.Изгибные колебания балок
6.3.1.Основное уравнение
Из курса сопротивления материалов известны дифференциальные зависимости при изгибе балок:
где EJ - жёсткость при изгибе; y=y (x , t ) - прогиб; M=M(x , t ) - изгибающий момент; q - интенсивность распределённой нагрузки.
Объединяя (189) и (190), получим
 .(191)
.(191)
В задаче о свободных колебаниях нагрузкой для упругого скелета являются распределённые силы инерции:
где m - интенсивность массы балки (масса единицы длины), и уравнение (191) принимает вид
 .
.
В частном случае постоянного поперечного сечения, когда EJ = const , m = const , имеем:
![]() .(192)
.(192)
Для решения уравнения (192) полагаем, как и выше,
y = X (x ) × T (t ).(193)
Подставляя (193) в (192), приходим к уравнению:
![]() .
.
Для тождественного выполнения этого равенства необходимо, чтобы каждая из частей равенства была постоянной. Обозначая эту постоянную через , получим два уравнения:
![]() .(195)
.(195)
Первое уравнение указывает на то, что движение носит колебательный характер с частотой .
Второе уравнение определяет форму колебаний. Решение уравнения (195) содержит четыре постоянных и имеет вид
Удобно использовать вариант записи общего решения, предложенный А.Н.Крыловым:
 (198)
(198)
представляют собой функции А.Н.Крылова.
Обратим внимание на то, что S=1, T=U=V=0 при x=0. Функции S,T,U,V связаны между собой следующим образом:
Поэтому производные выражения (197) записываются в виде
 (200)
(200)
В задачах рассматриваемого класса число собственных частот бесконечно велико; каждой из них отвечает своя функция времени T n и своя фундаментальная функция X n . Общее решение получится путём наложения частных решений вида (193)
![]() .(201)
.(201)
Для определения собственных частот и формул необходимо рассмотреть граничные условия.
6.3.2. Граничные условия
Для каждого конца стержня можно указать два граничных условия.
Свободный конец стержня (рис. 70,а). Нулю равны поперечная сила Q=EJX"""T и изгибающий момент M=EJX""T. Поэтому граничные условия имеют вид
X""=0; X"""=0 .(202)

Шарнирно-опёртый конец стержня (рис.70,б). Нулю равны прогиб y=XT и изгибающий момент M=EJX""T. Следовательно, граничные условиятаковы:
X=0 ; X""=0 .(203)
Защемленный конец (рис.70,в). Нулю равны прогиб y=XT и угол поворота . Граничные условия:
X=0; X"=0 . (204)
На конце стержня имеется точечный груз массы
(рис.70,г). Его
сила инерции ![]() может быть при помощи
уравнения (194) записана так: ; она должна быть равна поперечной силеQ=EJX"""T , поэтому граничные условия
принимают вид
может быть при помощи
уравнения (194) записана так: ; она должна быть равна поперечной силеQ=EJX"""T , поэтому граничные условия
принимают вид
![]() ; X""=0 .(205)
; X""=0 .(205)
В первом условии знак плюс принимается в случае, когда точечныйгруз связан с левым концом стержня, и знак минус, когда он связан с правым концом стержня. Второе условие вытекает из отсутствия изгибающего момента.
Упруго-опертый конец стержня
(рис.70,д).
Здесь изгибающий момент равен нулю, а поперечная сила Q=EJX"""T равна реакции
опоры ![]() (C o -коэффициент
жёсткости опоры).
(C o -коэффициент
жёсткости опоры).
Граничные условия:
X""=0 ; (206)
(знак минус принимается в случае, когда упругая опора является левой, и знак плюс, когда она является правой).
6.3.3. Частотное уравнение и собственные формы
Развёрнутая запись граничных условий приводит к однородным уравнениям относительно постоянных C 1 , C 2 , C 3 , C 4 .
Чтобы эти постоянные не равнялись нулю, должен равняться нулю определитель, составленный из коэффициентов системы; это приводит к частотному уравнению. При этих операциях выясняются соотношения между C 1 , C 2 , C 3 , C 4 , т.е. определяются собственные формы колебаний (с точностью до постоянного множителя).
Проследим составление частотных уравнений на примерах.
Для балки с шарнирно-опёртыми концами согласно (203) имеем следующие граничные условия: X=0; X""=0 при x=0 и x= . При помощи(197)-(200) получим из первых двух условий: C 1 =C 3 =0. Два оставшихся условия можно записать в виде

Чтобы C 2 и C 4 не были равны нулю, необходимо равенство нулю определителя:
![]() .
.
Таким образом, частотное уравнение имеет вид
![]() .
.
Подставляя выражения T и U, получим
Так как , то окончательно частотное уравнение записывается так:
. (207)
Корни этого уравнения:
,(n =1,2,3,...).
Учитывая (196), получим
![]() .(208)
.(208)
Перейдём к определению собственных форм. Из записанных выше однородных уравнений вытекает следующее соотношениемежду постоянными C 2 и C 4:
![]() .
.
Следовательно, (197) приобретает вид

Согласно (207), имеем
![]() ,(209)
,(209)
где - новая постоянная, значение которой остаётся неопределённым, пока не введены в рассмотрение начальные условия.
6.3.4. Определение движения по начальным условиям
Если требуется определить движение, следующее после начального возмущения, то необходимо указать для всех точек балки как начальные смещения, так и начальные скорости:
 (210)
(210)
и использовать свойство ортогональности собственных форм:
![]() .
.
Общее решение (201) запишем так:
![]() .(211)
.(211)
Скорость определяется выражением
![]() .(212)
.(212)
Подставляя в правые части уравнений (211) и (212) , а в левые части - предполагаемые известными начальные смещения и скорости, получим
![]()
![]() .
.
Умножая эти выражения на и интегрируя по всей длине, имеем
 (213)
(213)
Бесконечные суммы в правых частях исчезли вследствие свойства ортогональности. Из (213) следуют формулы для постоянных и
 (214)
(214)
Теперь эти результаты нужно подставить в решение (211).
Снова подчеркнём, что выбор масштаба собственных форм несущественен. Если, например, в выражении собственной формы (209) принять вместо величину в раз большую, то (214) дадут результаты в раз меньшие; после подстановки в решение (211) эти различия компенсируют друг друга. Тем не менее часто пользуются нормированными собственными функциями, выбирая их масштаб таким, чтобы знаменатели выражений (214) равнялись единице, что упрощает выражения и .
6.3.5. Влияние постоянной продольной силы
Рассмотрим случай, когда колеблющаяся балка испытывает действие продольной силы N , величина которой не меняется в процессе колебаний. В этом случае уравнение статического изгиба усложняется и приобретает вид (при условии, что сжимающая сила считается положительной)
![]() .
.
Полагая и считая жёсткость постоянной, получаем уравнение свободных колебаний
![]() .(215)
.(215)
Принимаем по-прежнему частное решение в виде.
Тогда уравнение (215) распадается на два уравнения:

Первое уравнение выражает колебательный характер решения, второе определяет форму колебаний, а также позволяет найти частоты. Перепишем его таким образом:
(216)
где K определяется формулой (196), а
Решение уравнения (216) имеет вид


Рассмотрим
случай, когда оба конца стержня имеют шарнирные опоры. Условия на левом конце ![]() дают . Удовлетворяя те же условия на правом конце, получим
дают . Удовлетворяя те же условия на правом конце, получим

Приравнивая нулю определитель, составленный из коэффициентов при величинах и , приходим к уравнению
Корни этого частотного уравнения:
Следовательно, собственная частота определится из уравнения
 .
.
Отсюда при учёте (217) находим
 .(219)
.(219)
При растяжении частота увеличивается, при сжатии уменьшается. Когда сжимающая сила N приближается к критическому значению, корень стремится к нулю.
6.3.6. Влияние цепных усилий
Ранее продольная сила считалась заданной и не зависящей от перемещений системы. В некоторых практических задачах сопровождающая процесс поперечных колебаний продольная сила возникает вследствие изгиба балки и носит характер реакции опоры. Рассмотрим, например, балку на двух шарнирно-неподвижных опорах. При её изгибе возникают горизонтальные реакции опор, вызывающие растяжение балки; соответствующее горизонтальное усилие принято называть цепным усилием . Если балка совершает поперечные колебания, то цепное усилие будет изменяться во времени.
Если в мгновение t прогибы балки определяются функцией , то удлинение оси можно найти по формуле
![]() .
.
Соответствующее цепное усилие найдём при помощи закона Гука
![]() .
.
Подставим этот результат в (215) вместо продольной силы N (с учётом знака)
![]() .(220)
.(220)
Полученное нелинейное интегродифференциальное уравнение упрощается при помощи подстановки
![]() ,(221)
,(221)
где безразмерная функция времени, максимальное значение которой можно положить равным любому числу, например, единице; амплитуда колебаний.
Подставляя (221) в (220), получим обыкновенное дифференциальное уравнение
![]() ,(222)
,(222)
коэффициенты которого имеют следующие значения:
![]() ;.
;.
Дифференциальное уравнение (222) является нелинейным, следовательно, частота свободных колебаний зависит от их амплитуды.
Точное решение для частоты поперечных колебаний имеет вид
где частота поперечных колебаний, вычисленная без учёта цепных усилий; поправочный коэффициент, зависящий от отношения амплитуды колебаний к радиусу инерции поперечного сечения ; величина приводится в справочной литературе.
При соизмеримости амплитуды и радиуса инерции поперечного сечения поправка к частоте становится значительной. Если, например, амплитуда колебаний стержня круглого сечения равна его диаметру, то , и частота почти в два раза больше, чем в случае свободного смещения опор.
Случай соответствует нулевому значению радиуса инерции, когда изгибная жёсткость балки исчезающе мала - струна. При этом формула для даёт неопределённость. Раскрывая эту неопределённость, получим формулу для частоты колебаний струны
![]() .
.
Эта формула относится к случаю, когда в положении равновесия натяжение равно нулю. Часто задачу о колебаниях струны ставят в других предположениях: считают, что перемещения малы, а растягивающая сила задана и остаётся неизменной в процессе колебаний.
При этом формула для частоты имеет вид
где N - постоянная растягивающая сила.
6.4. Влияние вязкого трения
Ранее предполагалось, что материал стержней идеально упругий и трение отсутствует. Рассмотрим влияние внутреннего трения, считая, что оно является вязким; тогда связь напряжений с деформациями описывается соотношениями
![]() ;
;![]() .(223)
.(223)
Пусть стержень с распределёнными параметрами совершает свободные продольные колебания. В этом случае продольная сила запишется в виде
Из уравнения движения элемента стержня было получено соотношение (174)
Подставляя сюда (224), приходим к основному дифференциальному уравнению
![]() ,(225)
,(225)
которое отличается от (175) вторым слагаемым, выражающим влияние сил вязкого трения.
Следуя методу Фурье, ищем решение уравнения (225) в виде
![]() ,(226)
,(226)
где функция только координаты x , а функция только времени t .
При этом каждый член ряда должен удовлетворять граничным условиям задачи, а вся сумма - также и начальным условиям. Подставляя(226)в(225)и требуя, чтобы равенство удовлетворялось для любого номера r , получим
![]() ,(227)
,(227)
где штрихи обозначают дифференцирование по координате x , а точки - дифференцирование по времени t .
Разделив
(227) на произведение ![]() , приходим к равенству
, приходим к равенству
 ,(228)
,(228)
левая часть, которого может зависеть только от координаты x , а правая - только от времени t . Для тождественного выполнения равенства (228) необходимо, чтобы обе части были равны одной и той же постоянной, которую обозначим через .
Из этого следуют уравнения
![]() (229)
(229)
![]() .(230)
.(230)
Уравнение (229) не зависит от коэффициента вязкости K и, в частности, остаётся таким же в случае идеально упругой системы, когда . Поэтому числа полностью совпадают с найденными ранее; однако, как будет показано ниже, величина даёт лишь приближённое значение собственной частоты. Отметим, что собственные формы совершенно не зависят от вязких свойств стержня, т.е. формы свободных затухающих колебаний совпадают с формами свободных незатухающих колебаний.
Теперь перейдём к уравнению (230), описывающему процесс затухающих колебаний; его решение имеет вид
 .(233)
.(233)
Выражение (232) определяет темп затухания, а (233) - частоту колебаний.
Таким образом, полное решение уравнения задачи
![]() .(234)
.(234)
Постоянные и всегда можно найти по заданным начальным условиям. Пусть начальные смещения и начальные скорости всех сечений стержня заданы следующим образом:
;![]() ,(235)
,(235)
где и - известные функции.
Тогда при , согласно (211) и (212), имеем

умножая обе части этих равенств на и интегрируя в пределах всей длины стержня, получим
 (236)
(236)
Соответственно условию ортогональности собственных форм все остальные слагаемые, входящие в правые части этих равенств, обращаются в нуль. Теперь из равенств (236) легко найти и для любого номера r .
Рассматривая (232) и (234), заметим, что чем выше номер формы колебаний , тем быстрее её затухание. Кроме того, слагаемые, входящие в(234), описывают затухающие колебания, если есть действительное число. Из (233) видно, что это имеет место лишь для нескольких начальных значений r , пока выполняется неравенство
При достаточно больших значенияхr неравенство (237) нарушается и величина становится мнимой. При этом соответствующие члены общего решения (234) уже не будут описывать затухающие колебания, но будут представлять апериодическое затухающее движение. Другими словами, колебания, в обычном смысле слова, выражает только некоторая конечная часть суммы (234).
Все эти качественные выводы относятся не только к случаю продольных колебаний, но и к случаям крутильных и изгибных колебаний.
6.5. Колебания стержней переменного сечения
В тех случаях, когда распределённая масса и сечение стержня переменны по его длине, следует вместо уравнения продольных колебаний (175) исходить из уравнения
![]() .(238)
.(238)
Уравнение крутильных колебаний (187) должно быть заменено уравнением
![]() ,(239)
,(239)
а уравнение поперечных колебаний (192) – уравнением
 .(240)
.(240)
Уравнения (238)-(240) при помощи однотипных подстановок ;;можно привести к обыкновенным дифференциальным уравнениям для функции
Продольные волны
Определение 1
Волна, в которой колебания происходят в направлении ее распространения. Примером продольной волны может служить звуковая волна.
Рисунок 1. Продольная волна
Механические продольные волны также называют компрессионными волнами или волнами сжатия, так как они производят сжатие при движении через среду. Поперечные механические волны также называют "Т-волны" или "волны сдвига".
Продольные волны включают в себя акустические волны (скорость частиц, распространяющихся в упругой среде) и сейсмические Р-волны (созданные в результате землетрясений и взрывов). В продольных волнах, смещение среды параллельно направлению распространения волны.
Звуковые волны
В случае продольных гармонических звуковых волн , частота и длина волны может быть описана формулой:
$y_0-$ амплитуда колебаний;\textit{}
$\omega -$ угловая частота волны;
$c-$ скорость волны.
Обычная частота $\left({\rm f}\right)$волны задается
Скорость звука распространения зависит от типа, температуры и состава среды, через которую он распространяется.
В упругой среде, гармоническая продольная волна проходит в положительном направлении вдоль оси.
Поперечные волны
Определение 2
Поперечная волна - волна, в которой направление молекул колебаний среды перпендикулярно к направлению распространения. Примером поперечных волн служит электромагнитная волна.
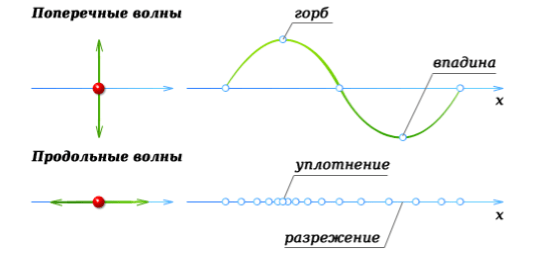
Рисунок 2. Продольная и поперечная волны
Рябь в пруду и волны на струне легко представить в виде поперечных волн.

Рисунок 3. Световые волны являются примером поперечной волны
Поперечные волны являются волнами, которые колеблются перпендикулярно к направлению распространения. Есть два независимых направления, в которых могут возникать волновые движения.
Определение 3
Двумерные поперечные волны демонстрируют явление, называемое поляризацией.
Электромагнитные волны ведут себя таким же образом, хотя это немного сложнее увидеть. Электромагнитные волны также являются двухмерными поперечными волнами.
Пример 1
Докажите, что уравнение плоской незатухающей волны ${\rm y=Acos}\left(\omega t-\frac{2\pi }{\lambda }\right)x+{\varphi }_0$ для волны, которая представлена на рисунке, можно записать в виде ${\rm y=Asin}\left(\frac{2\pi }{\lambda }\right)x$. Убедитесь в этом, подставив значения координаты$\ \ x$, которые раны $\frac{\lambda}{4}$; $\frac{\lambda}{2}$; $\frac{0,75}{\lambda}$.

Рисунок 4.
Уравнение $y\left(x\right)$ для плоской незатухающей волны не зависит от $t$, значит, момент времени $t$ можно выбрать произвольным. Выберем момент времени $t$ таким, что
\[\omega t=\frac{3}{2}\pi -{\varphi }_0\] \
Подставим это значение в уравнение:
\ \[=Acos\left(2\pi -\frac{\pi }{2}-\left(\frac{2\pi }{\lambda }\right)x\right)=Acos\left(2\pi -\left(\left(\frac{2\pi }{\lambda }\right)x+\frac{\pi }{2}\right)\right)=\] \[=Acos\left(\left(\frac{2\pi }{\lambda }\right)x+\frac{\pi }{2}\right)=Asin\left(\frac{2\pi }{\lambda }\right)x\] \ \ \[{\mathbf x}{\mathbf =}\frac{{\mathbf 3}}{{\mathbf 4}}{\mathbf \lambda }{\mathbf =}{\mathbf 18},{\mathbf 75}{\mathbf \ см,\ \ \ }{\mathbf y}{\mathbf =\ }{\mathbf 0},{\mathbf 2}{\cdot}{\mathbf sin}\frac{{\mathbf 3}}{{\mathbf 2}}{\mathbf \pi }{\mathbf =-}{\mathbf 0},{\mathbf 2}\]
Ответ: $Asin\left(\frac{2\pi }{\lambda }\right)x$
МЕХАНИКА
УДК 531.01/534.112
ПРОДОЛЬНЫЕ КОЛЕБАНИЯ ПАКЕТА СТЕРЖНЕЙ
А.М. Павлов, А.Н. Темнов
МГТУ им. Н.Э. Баумана, Москва, Российская Федерация e-mail: [email protected]; [email protected]
В вопросах динамики жидкостных ракет важную роль играет проблема устойчивости движения ракеты при возникновении продольных упругих колебаний. Появление таких колебаний может привести к установлению автоколебаний, которые в случае неустойчивости ракеты в продольном направлении могут привести к ее быстрому разрушению. Сформулирована задача о продольных колебаниях ракеты пакетной схемы, в качестве расчетной модели использован пакет стержней. Принято, что жидкость в баках ракеты "заморожена", т.е. собственные движения жидкости не учтены. Сформулирован закон баланса полной энергии для рассматриваемой задачи и приведена ее операторная постановка. Приведен численный пример, для которого определены частоты, построены и проанализированы формы собственных колебаний.
Ключевые слова: продольные колебания, частота и форма колебаний, пакет стержней, закон баланса полной энергии, самосопряженный оператор, спектр колебаний, POGO.
SYSTEM OF RODS LONGITUDINAL VIBRATIONS А.М. Pavlov, АЛ. Temnov
Bauman Moscow State Technical University, Moscow, Russian Federation e-mail: [email protected]; [email protected]
In questions of dynamics of liquid fuel rockets the problem of motion stability for this rocket has an important role with the appearance of longitudinal elastic vibrations. An occurrence of such kind vibrations can evoke self-vibrations which may cause rapid destruction of the rocket in case of rocket instability within longitudinal direction. The problem on longitudinal vibrations of the liquid fuel rocket based on the packet scheme has been formulated using package rods as computational model. It is assumed that the liquid in the rocket tanks is "frozen", i.e. proper motions of the liquid are not included. For this problem energy conservation principle was formulated and its operator staging is given. There is a numerical example, for which the frequencies have been determined, forms of Eigen vibration were built and analyzed.
Keywords: longitudinal vibrations, eigen modes and frequencies, rods model, energy conservation principle, selfadjoint operator, vibration spectrum, POGO.
Введение. В настоящее время в России и за рубежом для вывода на требуемую орбиту полезного груза часто используют ракеты-носители (РН) пакетной компоновки с одинаковыми боковыми блоками, равномерно распределенными вокруг центрального блока.
Исследования колебаний пакетных конструкций наталкиваются на определенные трудности, связанные с динамическим воздействием боковых и центрального блоков . В случае симметрии компоновки РН сложное, пространственное взаимодействие блоков пакетной конструкции можно разделить на конечное число типов колебаний, одним из которых являются продольные колебания центрального и боковых блоков . Математическая модель продольных колебаний подобной конструкции в виде пакета тонкостенных стержней подробно рассмотрена в работе . Рис. 1. Схема централь- В настоящей статье приведены теоретиче-ного стержня ские и вычислительные результаты продоль-
ных колебаний пакета стержней, дополняющие исследование, выполненное А.А. Пожалостиным .
Постановка задачи. Рассмотрим другие продольные колебания пакета стержней, состоящего из центрального стержня длиной l0 и N боковых стержней одинаковой длины j = l, (l0 > lj), j = 1, 2,..., N, скрепленных в точке А (xA = l) (рис. 1) с центральными пружинными элементами жесткостью k.
Введем неподвижную систему отсчета ОХ и предположим, что жесткость стержней EFj (x), распределенная масса mj (x) и возмущение q (x,t) являются ограниченными функциями координаты x:
0 0 < mj < mj (x) < Mj; (1) 0 Пусть при продольных колебаниях в сечениях стержней с координатой x возникают смещения Uj (x, t), определяемые по уравнениям mj (x) ^ - ¿(eFj (x) ^ = qj (x,t), j = 0,1, 2,..., N, (2) граничными условиями отсутствия нормальных сил на концах стержней 3 =0, х = 0, ^ = 1, 2, 0, x = 0, x = l0; условиями равенства нормальных сил, возникающих в стержнях, EF-3 = F x = l силам упругости пружинных элементов FпPJ = к (щ (ха) - щ (¡,)); (4) ЕУодХ (ха - 0) - EFодХ (ха + 0) = , х = ха; условием равенства перемещений в точке ха центрального стержня Щ (ха-о) = Щ (ха+о) и начальными условиями Щ у (х, 0) - Щ (х) ; , _ щ (х, 0) = Щ (х), где щ (х, 0) = "д^1 (х, 0). Закон баланса полной энергии. Умножим уравнение (2) на щ (х,£), проинтегрируем по длине каждого стержня и сложим результаты, используя граничные условия (3) и условие согласования (4). В результате получим ({ 1 ^ [ (диЛ 2 тз (х) "БТ" (х+ dt | 2 ^ J 3 w V dt N x „ ч 2 .. N „ i. 1 ^ Г „„ , f дп3\ , 1 ^ Гj 1 N /* i дпЛ 2 1 N fl j EF3 dx +2^Уо Ы (x - -)(no - Uj)2 dx = / ^ (х, £) их у (х,£) (х, (6) где 8 (х - ¡у) - дельта-функция Дирака. В уравнении (6) первое слагаемое в фигурных скобках представляет собой кинетическую энергию Т (¿) системы, второе - потенциальную энергию Пр (£), обусловленную деформацией стержней, а третье - потенциальную энергию Пк (£) пружинных элементов, которая при наличии упругих деформаций стержней может быть записана в виде Пк (*) = 2 £ / Су (¡у) 8 (х - ¡1) Е^ (¡у) (ддит (¡1)) 2 (х, Су = Еу. Уравнение (6) показывает, что изменение полной энергии в единицу времени рассматриваемой механической системы равно мощности внешнего воздействия. При отсутствии внешнего возмущения q (x,t) получаем закон сохранения полной энергии: T (t) + Пр (t) + Пк (t) = T (0) + Пр (0) + Пк (0). Операторная постановка. Закон баланса энергии показывает, что для любого момента времени t функции Uj (x, t) можно рассматривать как элементы гильбертова пространства L2j(; m3 (x)), определенные на длине ¡i скалярным произведением (us,Vk)j = J mj (x) usVkdx 0 и соответствующей нормой. Введем гильбертово пространство H, равное ортогональной сумме L2j, H = L20 Ф L21 Ф... Ф L2N, вектор-функцию U = (uo, Ui,..., uN)т и оператор A, действующий в пространстве H согласно соотношению AU = diag (A00U0, A11U1,..., Annun). mj (x) dx \ j dx " операторы, определенные на множестве Б (А33) С Н функций, удовлетворяющих условиям (3) и (4). Исходная задача (1)-(5) вместе с начальными условиями запишется в виде Аи = f (*), и (0) = и0, 17(0) = и1, (7) где f (*) = (до (*) ,51 (*),..., Ям (¿))т. Лемма. 1. Если выполнены первые два условия (1), то оператор А в эволюционной задаче (7) - неограниченный, самосопряженный, положительно определенный в пространстве Н оператор (Аи,К)н = (и,АК)н, (Аи, и)я > с2 (и, и)я. 2. Оператор А порождает энергетическое пространство НА с нормой, равной удвоенному значению потенциальной энергии колебаний пакета стержней 3 \ ^ I з)2 = 2П > 0. (8) IIUIIA = £/ EF^^J dx + k £ (uo - U)2 = 2П > 0. < Оператор А неограничен в пространстве Н, поскольку неограничен каждый диагональный элемент А33. Самосопряженность и положительная определенность оператора А проверяются непосредственно: (AU, v)h =/m (x) (-^| (EFo (x) ^j) Vo (x) dx+ +£ jm(x) (- jx) | (ef- (x) dndxa))v-(x) dx=... = EFo (x) uo (x) vo (x) dx - EFo (x) U) (x) vo (x) J EFo (x) uo (x) vo (x) dx - EFo (x) uo (x) ?o (x) + ^^ / EF- (x) u- (x) vo (x) dx - ^^ EF- (x) u- (x) v- (x) J EFo (x) uo (x) v" (x) dx - EFo (xa - 0) uo (xa - 0) vo (xa) + 0 EFo (xa + 0) uo (xa + 0) vo (xa) - £ EF- (/-) u- (/-) v- (/-) + J EF- (x) u- (x) v- (x) dx = J EFo (x) uo (x) vo (x) dx+ -=100 + £ / EF.,- (x) u- (x) г?- (x) dx+ o O (xa) - £ EF- (/-) u- (/-) v?"- (/-) = EFo (x) uo (x) v?"o (x) dx+ -=10 + £ / EF- (x) u- (x) v- (x) dx+ -=1 0 - + £ k (uo (xa) - u- (/-)) (vo (xa) - v- (/-)) = (U, A?)H (AU, U)H = ... = I EF0 (x) u"2 (x) dx - EF0 (x) u0 (x) u0 (x) J EF0 (x) u"0 (x) dx - EF0 (x) u0 (x) u0 (x) + ^^ / EFj (x) u"2 (x) dx - ^^ EFj (x) uj (x) u3 (x) "J EF°(x) u"2 (x) dx 4EF0 (x) u"2 (x) dx+£ JEFj (x) u"2 (x) dx У^ k (u0 (l) uj (l) - u2 (/)) + u0 (l) ^ k (u0 (l) - uj (l)) = EF0 (x) u"2 (x) dx + / EF0 (x) u"0 (x) dx + S / EFj (x) u"2 (x) dx + k ^ (u0 (l) - uj (l))2 > c2 (U, U)H Из приведенных результатов следует, что энергетическая норма оператора A выражается формулой (8). Разрешимость эволюционной задачи. Сформулируем следующую теорему. Теорема 1. Пусть выполнены условия U0 £ D (A1/2) , U0 £ H, f (t) £ C (; H), тогда задача (7) имеет единственное слабое решение U (t) на отрезке , определяемое по формуле U (t) = U0 cos (tA1/2) +U1 sin (tA1/2) +/sin ((t - s) A1/2) A-1/2f (s) ds. 5 отсутствии внешнего возмущения f (£) выполняется закон сохранения энергии 1 II A 1/2UИ2 = 1 1 II A1/2U 0|H. < Эволюционная задача (7) - это стандартная задача Коши для дифференциального операторного уравнения гиперболического типа, для которого выполнены все условия теоремы о разрешимости . Собственные колебания пакета стержней. Примем, что на стержневую систему не действует поле внешних сил: f (t) = 0. В этом случае движения стержней будем называть свободными. Свободные движения стержней, зависящие от времени t по закону exp (iwt), назовем собственными колебаниями. Приняв в уравнении (7) U (ж, t) = U (ж) eiWÍ, получим спектральную задачу для оператора A: AU - AEU = 0, Л = ш2. (9) Свойства оператора A позволяют сформулировать теорему о спектре и свойствах собственных функций . Теорема 2. Спектральная задача (9) о собственных колебаниях пакета стержней имеет дискретный положительный спектр 0 < Ai < Л2 < ... < Ak < ..., Ak ^ то и систему собственных функций {Uk (ж)}^=0, полную и ортогональную в пространствах H и HA, при этом выполнены следующие формулы ортогональности: (Ufe, Us)H = £ m (xj UfejMSjdx = j=0 0 (Uk= £/Ц^) d*+ K («feo - Mfej) (uso -) = Afeífes. j=i Исследование спектральной задачи в случае однородного пакета стержней. Представив функцию перемещений м- (ж,£) в виде м- (ж,£) = м- (ж) , после разделения переменных получим спектральные задачи для каждого стержня: ^Ои + Лм = 0, ^ = 0,1,2,..., N (10) которые запишем в матричной форме 4 £ + Ли = 0, А = -,-,-,...,- \ т0 т1 т2 т« и = (и0, и1, и2,..., и«)т. Решение и анализ полученных результатов. Обозначим функции перемещения для центрального стержня на участке как и01 и на участке как и02 (ж). При этом для функции и02 начало координат перенесем в точку с координатой /. Для каждого стержня представим решение уравнения (10) в виде Для нахождения неизвестных констант в (11) воспользуемся сформулированными выше граничными условиями. Из однородных граничных условий можно определить некоторые константы, а именно: C02 = C12 = C22 = C32 = C42 = ... = CN 2 = 0. В итоге остается найти N + 3 констант: C01, C03, C04, C11, C21, C31, C41,..., CN1. Для этого решим N + 3 уравнений относительно N + 3 неизвестных. Запишем полученную систему в матричной форме: (A) {C} = {0} . Здесь {C} = {C01, C03, C04, C11, C21, C31, C41,..., Cn 1}т - вектор неизвестных; (A) - характеристическая матрица, cos (Л1) EF0 Л sin (Л1) + Л sin (Л (Zo - 1)) Л cos (Л (Zo - 1)) 0 00 0 \ -1 0 0000 0 y 00 00 0 000Y а = к соэ ^ ^А-Л^ ; в = -к со8((.40-01Л)1/2 ^ ; 7 = (А4"-1 л) 1/2 ап ((А"1л) 1/2 + к сов ((А"1л) 1/2 ; (~ \ 1/2 ~ Л= ^Л] ; А-- : 3 = 0. Для нахождения нетривиального решения в качестве переменной примем константу С01 € М. Имеем два варианта: С01 = 0; С01 = 0. Пусть С01 = 0, тогда С03 = С04 = 0. В этом случае нетривиальное решение может быть получено, если 7 = 0 из (12) при выполнении дополнительного условия £ с-1 = 0, (13) которое может быть получено из третьего уравнения системы (12). В итоге получаем простое частотное уравнение ЕР (А"1 Л)1/2 вт ((А"1^1/2 П + зз у \ V зз K cos ^ (A-/a) 1/2 ^ = 0, j G , совпадающее с частотным уравнением для стержня упруго закрепленного на одном конце, который можно рассматривать как первую парциальную систему. В этом случае все возможные комбинации движений боковых стержней, удовлетворяющих условию (13), можно условно разделить на группы, соответствующие различным комбинациям фаз (в рассматриваемом случае фаза определяется знаком С.д). Если принять боковые стержни идентичными, то имеем два варианта: 1) Сд = 0, тогда число таких комбинаций п для различных N можно вычислить по формуле п = N 2, где - функция деления без остатка; 2) какая-либо (или какие-либо) из констант С- равны 0, тогда число возможных комбинаций возрастает и может быть определено по формуле £ [(N - m) div 2]. Пусть Coi = 0, тогда Cn = C21 = C31 = C41 = ... = CN1 = = C01 (-в/т), где в и y - комплексы, входящие в (12). Из системы (12) также имеем: C03 = C01 cos (Л/); C04=C03 tg (Л (/0 - /)) = C01 cos (A/) x x tg (Л (/0 - /)), т.е. все константы выражены через C01. Частотное уравнение принимает вид EFo U-o1 Л tg A-1 Л) " (lo - l)) - K2 cos | í a!-,1 Л В качестве примера рассмотрим систему с четырьмя боковыми стержнями. Кроме описанного выше способа для этого примера можно записать частотное уравнение для всей системы, вычислив определитель матрицы А и приравняв его нулю. Приведем его вид Y4 (Л sin (Л (/o - /)) cos (Л/) EFoЛ+ Л cos (Л (/o - /)) (EFoЛ sin (Л/) + 4в)) - 4авт3Л cos (Л(/0 - /)) = 0. Графики трансцендентных частотных уравнений для рассмотренных выше случаев представлены на рис. 2. В качестве исходных данных были приняты следующие: EF = 2 109 Н; EF0 = 2,2 109 Н; k = 7 107 Н/м; m = 5900 кг/м; mo = 6000 кг/м; / = 23; /о = 33 м. Значения первых трех частот колебаний рассматриваемой схемы приведены ниже: n..................................... и, рад/с.............................. 1 2 3 20,08 31,53 63,50 Рис. 2. Графики трансцендентных частотных уравнений для Coi = 0 (i) и Coi = 0 (2) Приведем формы колебаний, соответствующие полученным решениям (в общем случае формы колебаний не нормированы). Формы колебаний, соответствующие первой, второй, третьей, четвертой, 13 и 14 частотам, приведены на рис. 3. При первой частоте колебаний боковые стержни колеблются с одинаковой формой, но попарно в противофазе Рис.3. Формы колебаний боковых (1) и центральных (2) стержней, соответствующие первой V = 3,20 Гц (а), второй V = 5,02 Гц (б), третьей V = 10,11 Гц (в), четвертой V = 13,60 Гц (г), 13-й V = 45,90 Гц (д) и 14-й V = 50,88 Гц (е) частотам (рис. 3, а), при второй - центральный стержень совершает колебания, а боковые колеблются по одинаковой форме в фазе (рис. 3, б). Следует отметить, что первая и вторая частоты колебаний рассматриваемой стержневой системы соответствуют колебаниям системы, состоящей из твердых тел. При колебании системы с третьей собственной частотой первый раз появляются узлы (рис.3,в). Третья и последующие частоты (рис.3,г) соответствуют уже упругим колебаниям системы. С возрастанием частоты колебаний, связанной с уменьшением влияния упругих элементов, частоты и формы колебаний стремятся к парциальным (рис.3,д, е). Кривые функций, точки пересечения которых с осью абсцисс являются решениями трансцендентных уравнений, представлены на рис. 4. Согласно рисунку, собственные частоты колебаний системы расположены вблизи парциальных частот. Как было отмечено выше, при увеличении частоты сближение собственных частот с парциальными усиливается. В результате частоты, при которых колеблется вся система, условно разделяются на две группы: близкие к парциальным частотам бокового стержня и частоты, близкие к парциальным частотам центрального стержня. Выводы. Рассмотрена задача о продольных колебаниях пакета стержней. Описаны свойства поставленной краевой задачи и спектра ее собственных значений. Предложено решение спектральной задачи для произвольного числа однородных боковых стержней. Для численного примера найдены значения первых частот колебаний и построены соответствующие им формы. Также были выявлены некоторые характерные свойства построенных форм колебаний. Рис. 4. Кривые функций, точки пересечения которых с осью абсцисс являются решениями трансцендентных уравнений, для СоХ = 0 (1), Сох = 0 (2) совпадают с первой парциальной системой (боковой стержень, закрепленный на упругом элементе в точке х = I) и второй парциальной системы (5) (центральный стержень, закрепленный на четырех упругих элементах в точке А) ЛИТЕРАТУРА 1. Колесников К.С. Динамика ракет. М.: Машиностроение, 2003. 520 с. 2. Баллистические ракеты и ракеты-носители / О.М. Алифанов, А.Н. Андреев, В.Н. Гущин и др. М.: Дрофа, 2004. 511 с. 3. Рабинович Б.И. Введение в динамику ракет-носителей космических аппаратов. М.: Машиностроение, 1974. 396 с. 4. Parameter study on POGO stability of liquid rockets / Z. Zhao, G. Ren, Z. Yu, B. Tang, Q. Zhang // J. of Spacecraft and Rockets. 2011. Vol. 48. Is. 3. P. 537-541. 5. Балакирев Ю.Г. Методы анализа продольных колебаний ракет-носителей с жидкостным двигателем // Космонавтика и ракетостроение. 1995. № 5. С. 50-58. 6. Балакирев Ю.Г. Особенности математической модели жидкостной ракеты пакетной компоновки как объекта управлении // Избранные проблемы прочности современного машиностроения. 2008. С. 43-55. 7. Докучаев Л.В. Совершенствование методов исследований динамики ракеты-носителя пакетной конструкции с учетом их симметрии // Космонавтика и ракетостроение. 2005. № 2. С. 112-121. 8. Пожалостин А.А. Разработка приближенных аналитических методов расчета собственных и вынужденных колебаний упругих оболочек с жидкостью: дис. ... д-ра техн. наук. М., 2005. 220 с. 9. Крейн С.Г. Линейные дифференциальные уравнения в банаховых пространствах. М.: Наука, 1967. 464 с. 10. Копачевский И.Д. Операторные методы математической физики. Симферополь: ООО "Форма", 2008. 140 с. Kolesnikov K.S. Dinamika raket . Moscow, Mashinostroenie Publ., 2003. 520 p. Alifanov O.N., Andreev A.N., Gushchin V.N., eds. Ballisticheskie rakety i rakety-nositeli . Moscow, Drofa Publ., 2003. 511 p. Rabinovich B.I. Vvedenie v dinamiku raket-nositeley kosmicheskikh apparatov . Moscow, Mashinostroenie Publ., 1974. 396 p. Zhao Z., Ren G., Yu Z., Tang B., Zhang Q. Parameter study on POGO stability of liquid fuel rocket. J. Spacecraft and Rockets, 2011, vol. 48, iss. 3, pp. 537-541. Balakirev Yu.G. Methods of analysis of longitudinal vibrations of launch vehicles with liquid propellant engine. Kosm. i raketostr. , 1995, no. 5, pp. 50-58 (in Russ.). Balakirev Yu.G. Osobennosti matematicheskoy modeli zhidkostnoy rakety paketnoy komponovki kak ob"ekta upravlenii . Sb. "Izbrannye problemy prochnosti sovremennogo mashinostroeniya" . Moscow, Fizmatlit Publ., 2008. 204 p. (cited pp. 4355). Dokuchaev L.V. Improvement of methods for studying the dynamics of clustered launch vehicle considering their symmetry. Kosm. i raketostr. , 2005, no. 2, pp. 112-121 (in Russ.). Pozhalostin A.A. Razrabotka priblizhennykh analiticheskikh metodov rascheta sobstvennykh i vynuzhdennykh kolebaniy uprugikh obolochek s zhidkost"yu. Diss. doct. tekhn. nauk . Kreyn S.G. Lineynye differentsial"nye uravneniya v Banakhovykh prostranstvakh . Moscow, Nauka Publ., 1967. 464 p. Kopachevskiy I.D. Operatornye metody matematicheskoy fiziki . Simferopol", Forma Publ., 2008. 140 p. Статья поступила в редакцию 28.04.2014 Павлов Арсений Михайлович - студент кафедры "Космические аппараты и ракеты-носители" МГТУ им. Н.Э. Баумана. Специализируется в области ракетно-космической технологии. МГТУ им. Н.Э. Баумаш, Российская Федерация, 105005, Москва, 2-я Бауманская ул., д. 5. Pavlov A.M. - student of "Spacecrafts and Launch Vehicles" department of the Bauman Moscow State Technical University. Specialist in the field of rocket-and-space technology. Bauman Moscow State Technical University, 2-ya Baumanskaya ul. 5, Moscow, 105005 Russian Federation. Темнов Александр Николаевич - канд. физ.-мат. наук, доцент кафедры "Космические аппараты и ракеты-носители" МГТУ им. Н.Э. Баумана. Автор более 20 научных работ в области механики жидкости и газа и ракетно-космической технологии. МГТУ им. Н.Э. Баумаш, Российская Федерация, 105005, Москва, 2-я Бауманская ул., д. 5. Temnov A.N. - Cand. Sci. (Phys.-Math.), assoc. professor of "Spacecrafts and Launch Vehicles" department of the Bauman Moscow State Technical University. Author of more than 20 publications in the field of fluid and gas mechanics and rocket-and-space technology. Bauman Moscow State Technical University, 2-ya Baumanskaya ul. 5, Moscow, 105005 Russian Federation.







